Overview
3D point cloud generation and mapping in ROS Melodic, plus AR tag detection using the RealSense pipeline in MATLAB.
Details
Experimentation with an Intel RealSense RGB-D camera while working at the UTS Robotics Institute.
Key Features
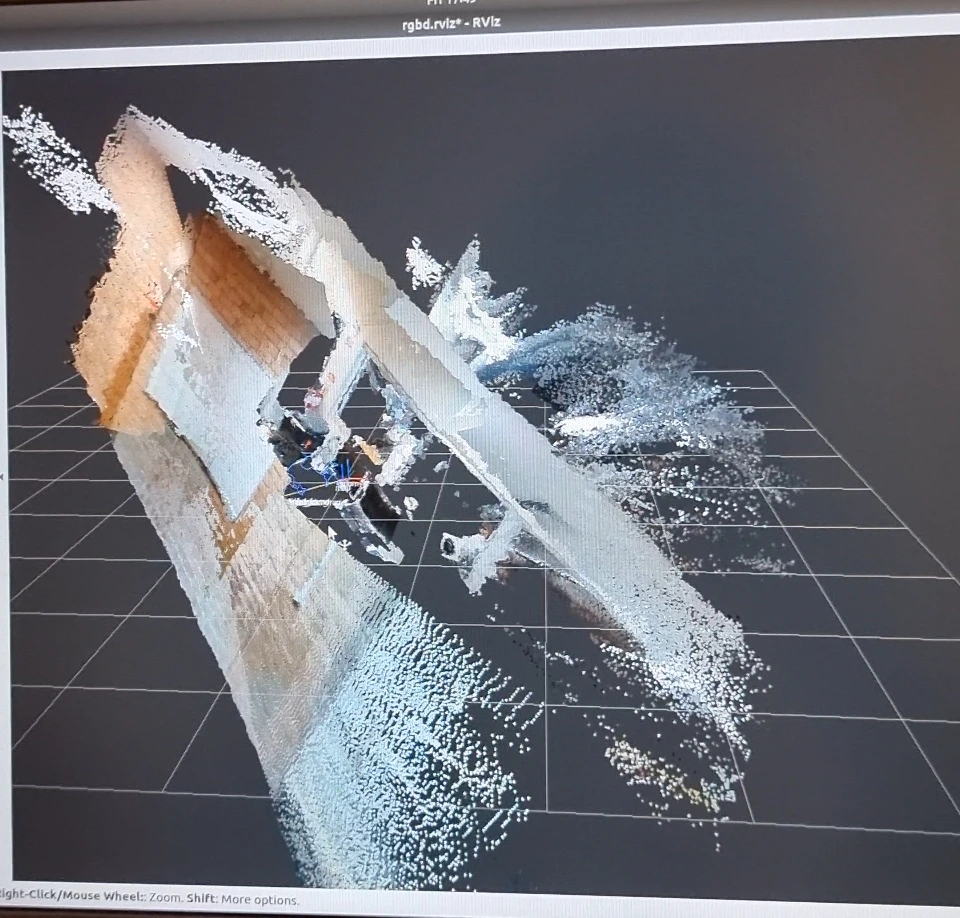
- 3D point cloud generation and mapping in ROS Melodic using the RealSense demo packages, live depth data visualised and accumulated into a 3D map
- AR tag detection using the RealSense pipeline in MATLAB, tags identified and localised in 3D space using the camera’s depth stream