Overview
Industrial robotics coursework project: two collaborative robots programmed to perform coordinated cooking tasks.
Details
Industrial Robotics (Spring 2024) · Distinction
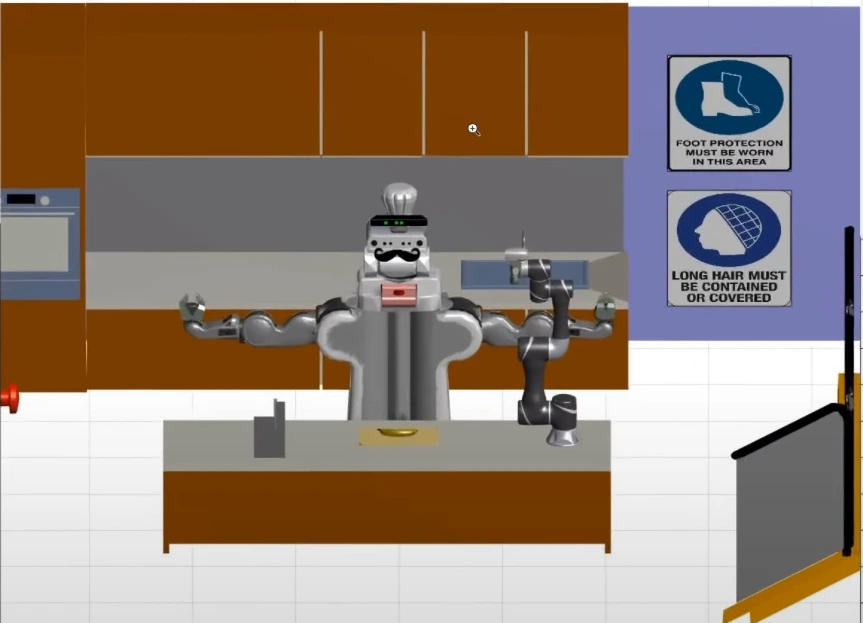
A coursework project working in pairs to program two robot manipulators in an environment of our choosing. My team chose the PR2 (Wii Wii) with 15 DOF and the TM5700 (Mii) with 6 DOF to build a cooking cobot pair. I developed all logic for the PR2 and contributed to the TM5, while managing the shared codebase to ensure consistent structure across GitHub merge requests and testing.
My Contributions
- Cubic spline trajectory generation using waypoints
- 2D LiDAR simulation for the PR2 to detect objects
- GUI for PR2 manual control via sliders with collision detection
- Custom controller for TM5 manual operation
- Forward and inverse kinematics for both robots
- Pseudo-inverse Jacobian control for the PR2
- Hybrid control: Cartesian Trajectory + IK for PR2; RMRC + IK for TM5
- PR2 and TM5 working together to prepare food
- Python/ROS Noetic code to command a real TM5 arm over ROS
Repositories: Main Codebase · TM5 ROS Python